Unser umfangreiches Robotersortiment bietet neben anwendungsbezogenen Varianten wie Schweiss-, Palettier-, Lackier- und Handling-Roboter auch Modelle für Labor- und Reinraumapplikationen sowie schlüsselfertige automatisierte Schweißsysteme höchster Qualität.
Verpackungstechnik
Überblick
Motoman-Roboter in der Verpackungsindustrie
Die Verpackungsindustrie benötigt standfeste und verlässliche Maschinentechnik. Ungeplane Ausfallzeiten sind ein No-Go, insbesondere hier am Ender der Wertschöpfungskette einer Produktion. Das Abfüllen oder EInpacken von Produkten, Kartons oder Getränkekästen, Blister, Säcke oder ganze Lageon davon ist von Fall zu Fall verschieden, und alle beteiligten Maschinenkomponenten müssen sicher und perfekt zusammenarbeiten.
Yaskawa hat sich seit vielen Jahren als verlässlicher Partner in diesem Feld bewährt, und liefert sowohl Antriebstechnik als auch Robotertechnik für diese anspruchsvolle Aufgabe.
Die schlüsselfertige Umsetzung Ihrer Verpackungsanlage übernehmen unsere erfahrenen Systemintegratoren überall in Europa oder weltweit, die wir mit Produkten, Technologie, Schulung und Service unterstützen.
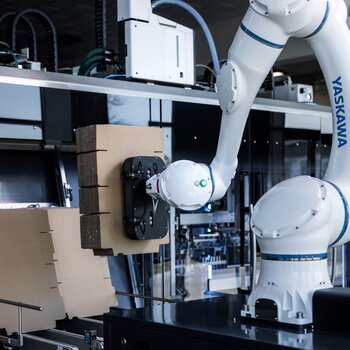
Kartons aufrichten mit Motoman Robotern
Zum Aufrichten von Kartons sind Roboter eine flaxible Alternative zu stationären Kartonaufrichter-Installationen. Der Roboter kombiniert das Kartonaufrichten zumeist mit weiteren Aufgaben wie Einpacken der Ware, Karton verschließen, etikettieren und abstapeln.
Befüllen von Kartons (Pick & Pack) mit Motoman-Robotern
Für weitere Informationen über Pick&Pack-Vorgänge verweisen wir auf ein separates Kapitel.
Verpacken von Ware mit Motoman-Robotern
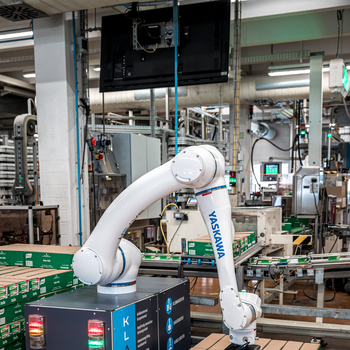
Palettieren von Ware mit Motoman Robotern
Mehr dazu siehe Kapitel "Palettieren".
Etikettieren von Ware mit Motoman-Robotern
Mehr Informationen zur Anwendung des Etikettierens hier.
Offline-Simulation einer Palettierzelle mit MotoSim
Für die Auslegung von Palettierstationen empfehlen wir, die MotoSim-Software zu verwenden, um einen digitalen Zwilling Ihrer Arbeitszelle zu erstellen. Hier können Sie Komponenten in ihrer optimalen Position anordnen, die optimale Position des Roboters zum Förderer oder den Palettenpositionen herausfinden, die richtige Höhe des Robotersockels ermitteln, Reichweiten- und Zugänglichkeitstests durchführen, Stapelmuster und Stapelhöhen überprüfen und eine komplette Arbeitszelle in Bezug auf Taktgeschwindigkeit und Platzbedarf optimieren, bevor Sie in Stahl und Eisen gehen.