Unser umfangreiches Robotersortiment bietet neben anwendungsbezogenen Varianten wie Schweiss-, Palettier-, Lackier- und Handling-Roboter auch Modelle für Labor- und Reinraumapplikationen sowie schlüsselfertige automatisierte Schweißsysteme höchster Qualität.
Palettieren
Überblick
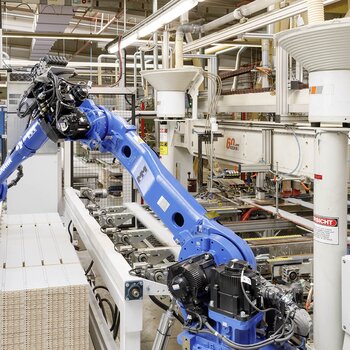
Palettieren und Depalettieren mit Motoman-Robotern
Beim Palettieren werden Produkte zum Transport auf eine Versandpalette (aus Holz oder Kunststoff) gestapelt. Das Depalettieren ist das Entladen dieser Produkte von der Palette am Zielort. Das Palettieren ist für den Roboter die einfachere der beiden Aufgaben, weil die Abnahmeposition fest ist und die Zielposition einfach errechnet werden kann. Das Depalettieren ist komplexer und erfordert in der Regel maschinelle Bildverarbeitung und clevere Greiftechnik.
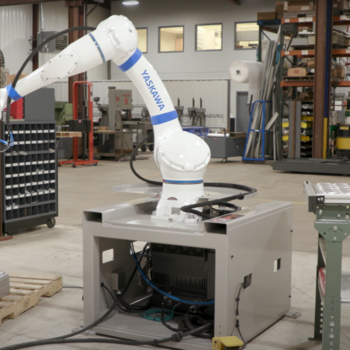
YASKAWA Motoman-Roboter sind die beste Wahl für jede Art von Palettieren und Depalettieren. Mit der MPL-Serie, der PL-Serie und der HC-Serie bietet YASKAWA ein volles Sortiment an Robotern und kollaborativen Robotern zum Palettieren und Depalettieren an, mit denen Sie die Verpackung und Logistik Ihrer Produkte automatisieren können. Die neue Generation der PL-Serie sind die schnellsten Palettierroboter auf dem Markt, mit denen Sie unschlagbare Zykluszeiten erreichen können.
Standardsierte Palettier-Stationen
Unser Netzwerk von Systemintegratoren, Motoman Strategic Partners, bietet eine breite Palette von Standard-Palettierzellen an, die unter Berücksichtigung typischer Kundenanforderungen und der Erfahrung des Systemintegrators entwickelt wurden.
Individuelle Palettier-Stationen
Unser Netzwerk von Systemintegratoren (Motoman Strategic Partners) bietet Know-How und Branchenerfahrung, um schlüsselfertige Roboteranlagen für alle Anwendungsfälle und Herausforderungen zu liefern. Wir vermitteln Ihnen gern die notwendigen Kontakte, egal ob es sich um einfachste Low-Cost-Palettieraufgaben oder um komplextere Kartonverpackungs-, Kommissionier- und Lagerverteilungssysteme handelt.
Schlüsselfertige automatische Roboter-Verpackungsanlagen
Eine Roboter-Verpackungsanlage bekommt die zu palettierende Ware sehr häufig auf einem Förder- oder Rollenband angeliefert. Der Roboter stapelt die Ware dann in einem definierten Muster auf die Palette. Automatische Roboter-Palettierzellen erfüllen oft nicht nur die Aufgabe des reinen Palettiervorgangs, sondern auch das Verpacken der Ware, Handling der Paletten (Zu- und Abführen), das Einlegen von Zwischenlagen zwischen die Ware, das Folienverpacken oder das Etikettieren des Palettenstapels.
Motoman Palettierroboter und Produkte
Das Portfolio der Motoman-Roboter umfasst:
- 4-, 5-achsige Palettierroboter (MPL-Serie, PL-Serie) mit Traglasten von 50 kg bis 800 kg.
- 6-Achsen-Handhabungsroboter (GP-Serie)
- Kollaborative Palettierroboter (HC10, HC10DT, HC10DT-IP67 und HC20DT)
- PalletSolver-Software zum einfachen Erstellen von Palettiermustern, auch für Mehrfachgreifer
- MotoSim-Software zur einfachen Planung von Palettierzellen
- MotoSight2D Bildverarbeitungssystem zum Erkennen von Werkstücken bei ungeordneter Bereitstellung
- Schnittstellen zu intelligenten 3D-Vision-Systemen, um mit einer hohen Vielfalt verschiedener Produktgeometrien umgehen zu können
- Schnittstellen zu intelligenter 2D und 3D Musteroptimierungs-Software, zum optimierten Stapelaufbau ("Tetris") von Produkten unterschiedlicher Größe und Gewicht
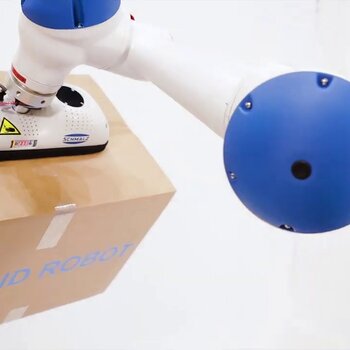
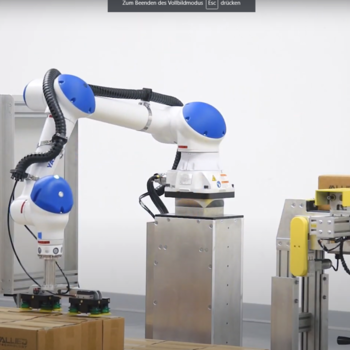
Einfache Kollaborative Palettierstationen
Das Palettieren von Kartons oder Kisten in Logistiklagern, Warenhäusern, Distributionszentren und in der betrieblichen Intralogistik ist eine harte und ungesunde Routinearbeit für menschliche Arbeitskräfte, besonders wenn es um größere Kartons und/oder Gewichte von mehr als 8 kg geht. Wenn der Mensch Paletten stapelt, können Durchsatz, Stapelmethode, Ausrichtung und Stabilität des Stapels variieren.
Auch aus Mangel an Arbeitskräften und auf Druck der Berufsgenossenschaften suchen viele Unternehmen eine einfache Art der Automatisierung, jedoch würde die Installation einer klassischen Roboter-Palettierstation Änderungen im Arbeitsablauf oder Umbauten erfordern, oder die benötigte Installationsfläche ist nicht da - eine Amortisation solcher Projekte wäre nicht mehr gegeben.
Die schutzzaunlose Mensch-Roboter-Kollaboration hat dieses Dilemma aufgelöst, und so entstehen gerade für Palettieranwendungen viele kleine Installationen mit unseren kollaborativen Robotern der HC-Serie, die mit Traglasten von bis zu 20kg bei großen Reichweiten hervorragend einsetzbar sind.
Solche schutzzaunlose Palettierstationen lassen sich schnell installieren, da die sichere Roboter- und Greifertechnologie verfügbar ist, die Risikobewertung nicht sehr schwierig ist, und aufgrund der Bedienerfreundlichkeit der Programmieraufwand äußerst gering ist.

Motoman PalletSolver Software
PalletSolver ist eine Software-Anwendung, die automatisch Palettiermuster (2D/3D-Stapelung) und entsprechende Roboterbewegungen generiert, einschließlich der Bahnplanung und Greifer-Ansteuerung). Sie unterstützt viele verschiedene Greifertypen, mehrere gleichzeitig gegriffene Werkstücke und mehrere Paletten.
Offline-Simulation einer Palettierzelle mit MotoSim
Für die Planung und Auslegung von Palettierstationen empfehlen wir, die MotoSim-Software zu verwenden, um einen digitalen Zwilling Ihrer Arbeitszelle zu erstellen. Hier können Sie Komponenten optimal anordnen, die optimale Position des Roboters zum Förderer oder den Palettenpositionen herausfinden, die richtige Höhe des Robotersockels ermitteln, Reichweiten- und Zugänglichkeitstests durchführen, Stapelmuster und Stapelhöhen überprüfen und eine komplette Arbeitszelle in Bezug auf Taktzeit und Platzbedarf optimieren, bevor Sie in Stahl und Eisen gehen.
Bei einer kooperativen (schutzzaunlosen) Installation ist eine fertige Simulation und Videosequenz perfekt für eine vorläufige Sicherheits-/Risikobewertung, und gibt Ihnen Planungssicherheit. Sie können Zeitanteile simulieren, wo eine sichere Mensch-Roboter-Interaktion erforderlich ist, und wo der Roboter in hoher geschwindigkeit ungestört arbeiten kann, und bekommen wertvolle Fakten zur Ermittlung der realen Zykluszeit und Amortisation.
Motologix - IEC 61131 Roboterprogrammierung über SPS
Viele Palettierroboter werden in SPS-gesteuerte Verpackungsanlagen integriert, wobei die gesamte Automation der Anlage - und am besten auch die Roboterbewegungen - von der SPS gesteuert werden sollen. So benötigt man nur SPS-Programmierer, aber keine Roboterprogrammierer.
Motologix ist eine Softwareschnittstelle zur Programmierung von Robotern direkt über SPS-Funktionsbausteine, die für Programmierumgebungen gängiger SPS-Hersteller auf dem markt verfügbar sind. Die Schnittstelle arbeitet mit allen Motoman-Robotern (einschließlich kollaborativer Roboter) mit YRC1000, YRC1000micro und DX200-Steuerungen, unterstützt Master/Slave-Steuerung von bis zu 4 Robotern, externe Achsen und Förderbänder.
Für die Roboterprogrammierung, das Testen oder den Betrieb des Roboters sind keine Roboter-Handbediengeräte oder Yaskawa-spezifische Robotik-Kenntnisse erforderlich. Die Daten werden in der SPS gespeichert. Die Bahn- und Geschwindigkeitsperformance ist durch die Motologix-Programmierung nicht eingeschränkt.
Palettiergreifer für Paletten, Kartons, Säcke und andere Werkstücke
Ein großer Erfolgsfaktor für eine Palettieranwendung list der Greifer und dessen Konstruktion und Zuverlässigkeit. Unsere Systemintegratorem besitzen ihre Kernkompetenz im Greiferbau in ihren jeweiligen Märkten und Anwendungen. Bewegungen im Greifer (z.B. bei Mehrfachgreifern mit drehenden Sektionen oder Rollgreifern) können als Zusatzachsen vom Roboter mit gesteuert werden.
Palettieren von Kartons und Ladungsträger-Kisten mit Motoman-Robotern
Kartons und Behälter haben eine schöne quaderförmige Geometrie mit flachen Oberflächen. Sie können von Robotern mit pneumatischen oder einfachen mechanischen Greifern leicht gegriffen werden.
Palettieren von Einzelkartons
Die einfachste Komplexitätsstufe ist das Greifen einzelner Kartons. Die Ablagemuster können sehr einfach programmiert werden.
Gleichzeiges Greifen mehrerer Kartons
Das gleichzeitige Greifen mehrerer Kartons erhöht den Durchsatz in der Roboter-Palettierstation. Es erfordert jedoch mehr technischen Aufwand seitens der Karton-Zuführung, um die ankommende Kisten zu sammeln und für den Mehrfachgreifer passend zu präsentieren. Die Komplexität des Greifers wird möglicherweise etwas komplexer, um die Kartons auf der Zielpalette im richtigen Muster ablegen zu können. Hier hilft eine Software zur Erzeugung des Stapelmusters. Gutes Greiferdesign zum Erreichen optimierter Zykluszeiten ist das Kern-Know-how des Systemintegrators. Motoman-Roboter tragen aufgrund ihrer ausgezeichneten Achsgeschwindigkeiten dazu bei.
Palettieren von ganzen Lagen
Beim auftragsbezogenen Komissionieren von Ware können Roboter ganze Lagen von Ware greifen.
Palettieren von Säcken mit Motoman-Robotern
Roboter-Sackgreifer (pneumatisch oder mechanisch) sind etwas aufwendiger konstruiert als Greifer für Kisten. Im Gegensatz zu Kisten sind Säcke nicht formstabil, und erfordern ggf. etwas mehr Logik beim Auflegen auf den Zielstapel.
Typische Produkte in Säcken und Beuteln, die mit Robotern palettiert werden sollen, sind Granulate und Pulver, wie Salz, Chemikalien, Düngemittel, Tierfutter, Sand, Samen, Rindenmulch, Pellets oder gewaschene Steine.
Palettieren von folierten Gebinden
In Folie verpackte Ware lässt sich über pneumarische Flächengreifer sehr einfach palettieren.
Palettieren von Getränken mit Motoman-Robotern (Flaschen und Kästen)
Viele Motoman-Palettierroboter werden in dier Getränke-Industrie eingesetzt. Her bietet Yaskawa das extrem wartungdfreundliche und robuste Flaschengreifersystem "Airgrip" als eigenes Produkt an, mehr dazu finden Sie hier.
Palettieren von Kunststoffkanistern (Wasser, Chemikalien, Öl)
Palettieren von Büchern mit Motoman-Robotern
Palettieren von Sandgussformen mit Motoman-Robotern
Depalettieren mit Motoman-Robotern
Das Depalettieren von Objekten, die in geordneter Sortierung auf der Ebene präsentiert werden, ist eigentlich ein einfacher Pick & Place-Vorgang und damit emit geringem Aufwand zu automatisieren.
Depalettieren von Ware von zufälliger Größe, Geometrie und Lage
Bei anspruchsvolleren Depalettieraufgaben wird mit Bildverarbeitung gearbeitet, die den Aufnahmepunkt im Raum, die Aufnahmepose und die Annäherungstrajektorie für den Roboter automatisch berechnet. Mit moderner Bildverarbeitungs-Software, entweder muster - oder KI-basiert, können heute sehr gute Pickraten erreicht werden.