Unser umfangreiches Robotersortiment bietet neben anwendungsbezogenen Varianten wie Schweiss-, Palettier-, Lackier- und Handling-Roboter auch Modelle für Labor- und Reinraumapplikationen sowie schlüsselfertige automatisierte Schweißsysteme höchster Qualität.
HC-Serie
HC10DTFP
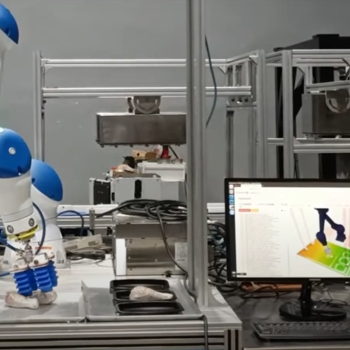
Idealer Cobot für sensitive Umgebungen

Überblick
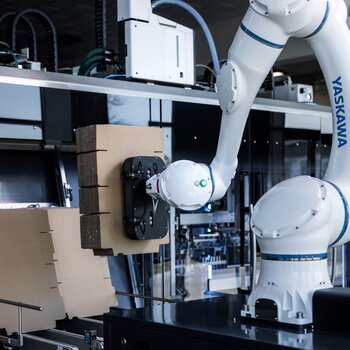
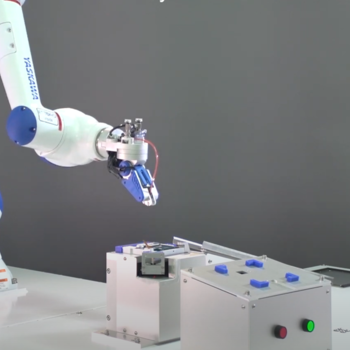
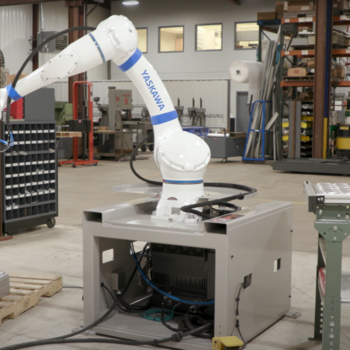
Der MOTOMAN HC10DTFP Cobot ist ein für den kollaborierenden Betrieb geeigneter 6-Achs-Roboter mit einer Traglast von bis zu 10 kg. Er bietet eine absolute Reichweite (Drehmittelpunkt S/L-Achse bis Drehmittelpunkt R/T-Achse) von 1.379 mm und eine effektive Reichweite (Drehmittelpunkt S/L-Achse bis Arbeitspunkt P) von 1.200 mm. Der Cobot unterstützt sowohl 1-phasige als auch 3-phasige Stromversorgungen.
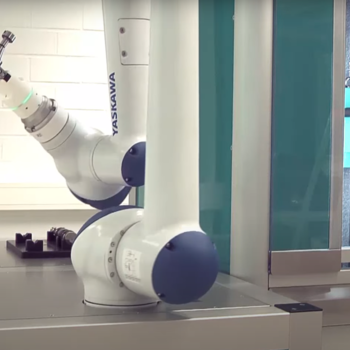
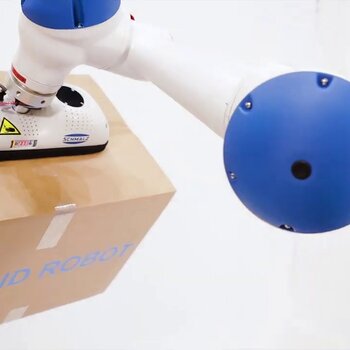
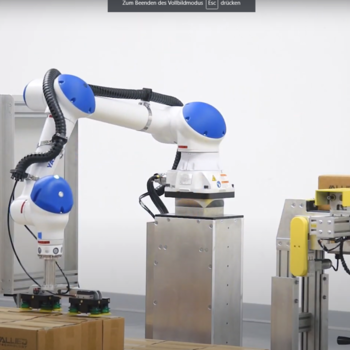
Die pulverbeschichtete Oberfläche des Roboters erlaubt die Säuberung auch mit alkalischen oder säurehaltigen Reinigungsmitteln. Zudem ist er gemäß EN 60529-IP67 besonders staub- und wasserdicht und kann auch unter rauen Arbeitsbedingungen eingesetzt werden. Die Verwendung von speziell für den Lebensmittelbereich zugelassenen Schmierstoffe, der ISO-Klasse 5 sowie der Schutzklasse IP67, ermöglichen den Einsatz zum Handhaben und in der Verpackung von Lebensmitteln sowie in der Pharmaindustrie.
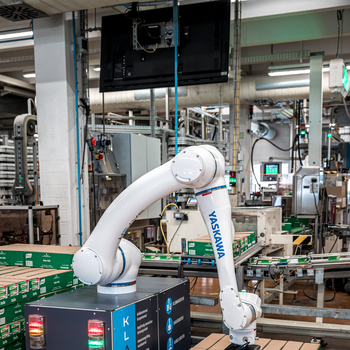
Der MOTOMAN HC10DTFP kann mit Hilfe von Handführung, Standard-Programmierhandgerät oder dem intuitiven Smart Pendant bedient und programmiert werden. Für eine besonders effiziente Programmierung über Handführung besitzt er am Handgelenk Direct Teach Buttons, mit denen geteachte Positionen sofort übernommen werden können, ohne sie am Programmier-Handgerät zu bestätigen. Dies reduziert die Programmierzeiten und damit eignet er sich sowohl für professionelle Systemintegratoren als auch für Neueinsteiger. Viele Sicherheitsfunktionen, z.B. das automatische Zurückziehen aus einer Klemmsituation, oder das einfache Wegschieben des Roboters mit Wiederaufnahme der Bewegung machen diesen Roboter zu einem professionellen kollaborativen Roboter.
Er ist umschaltbar zwischen sicher überwachten Betrieb und voller Leistung und Geschwindkeit, mit diesem Mischbetrieb (Hybridroboter) erreicht er sehr gute Taktzeiten. Im Arm sind Medienkabel für die Versorgung von Greifern oder Werkzeugen vorverlegt, die am Handgelenk herausgeführt werden, sodass sperrige außenliegende Kabelpakete zum Großteil nicht erforderlich sind.
Der HC10DTFP kann sowohl mit der Robotersteuerung YRC1000 als auch der Kompaktsteuerung YRC1000micro betrieben werden.
- Enhanced Operator Safety: Advanced Power and Force Limit technology ensures immediate robot stops upon contact.


Technische Daten
- Anzahl der Achsen
- 6
- Traglast
- 10 kg
- Max. Arbeitsbereich
- 1379 mm
- Wiederholgenauigkeit
- 0.05 mm
- Gewicht
- 58 kg
- Spannungsversorgung
- 1 kVA
- Maximum Speed S Axis
- 130 °/s
- Maximum Speed L Axis
- 130 °/s
- Maximum Speed U Axis
- 180 °/s
- Maximum Speed R Axis
- 180 °/s
- Maximum Speed B Axis
- 250 °/s
- Maximum Speed T Axis
- 250 °/s
- Montage-Optionen
- x Nein
- weitere Spezifikationen
- x Nein
Downloads
| Name | |||
| HC10DTFP 2D CAD/CAE | | CAD/CAE | ||
| HC10DTFP 3D CAD/CAE | | CAD/CAE | ||
|
Flyer Cobot HC10DTFP
Human-Collaborative Robot for sensitive Environments Datenblatt | Englisch |
Datenblatt | Englisch | |
|
Flyer Cobot HC10DTFP
Human-Collaborative-Roboter für sensitive Umgebungen Datenblatt | Deutsch |
Datenblatt | Deutsch | |
|
Flyer Cobot HC10DTFP
Robot collaboratif pour les environnements sensibles Datenblatt | Französisch |
Datenblatt | Französisch | |
| Assistenzroboter_Kollaborative Applikationen Broschüren/Kataloge | Deutsch | Broschüren/Kataloge | Deutsch | |
| Robot Assistants_Collaborative Applications Broschüren/Kataloge | Englisch | Broschüren/Kataloge | Englisch | |
|
Flyer Cobot HC10DTFP
Robot colaborativo para entornos sensibles Datenblatt | Spanisch |
Datenblatt | Spanisch |